Control Systems & Robotics
21 demosClosed-loop control and robotics — autopilots, motor drives, and manipulators modelled and tuned on the canvas.
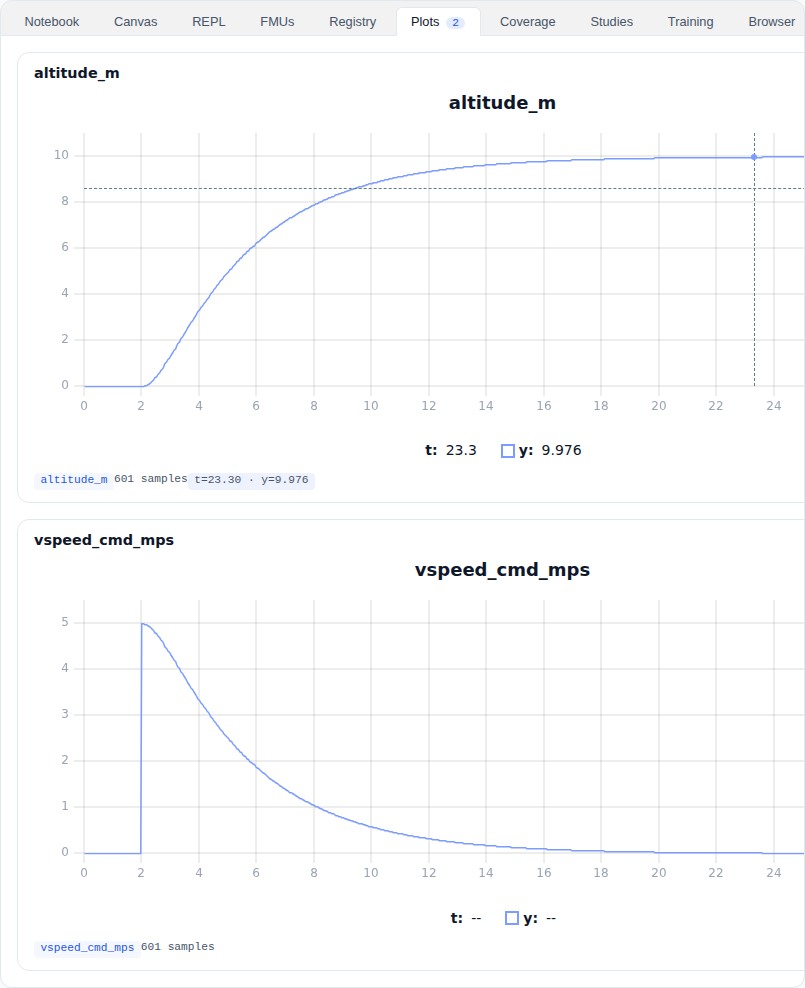
Quadcopter altitude hold
An altitude-hold outer-loop P controller cascaded into a first-order vertical-speed plant and altitude integrator — a quadcopter holding height.
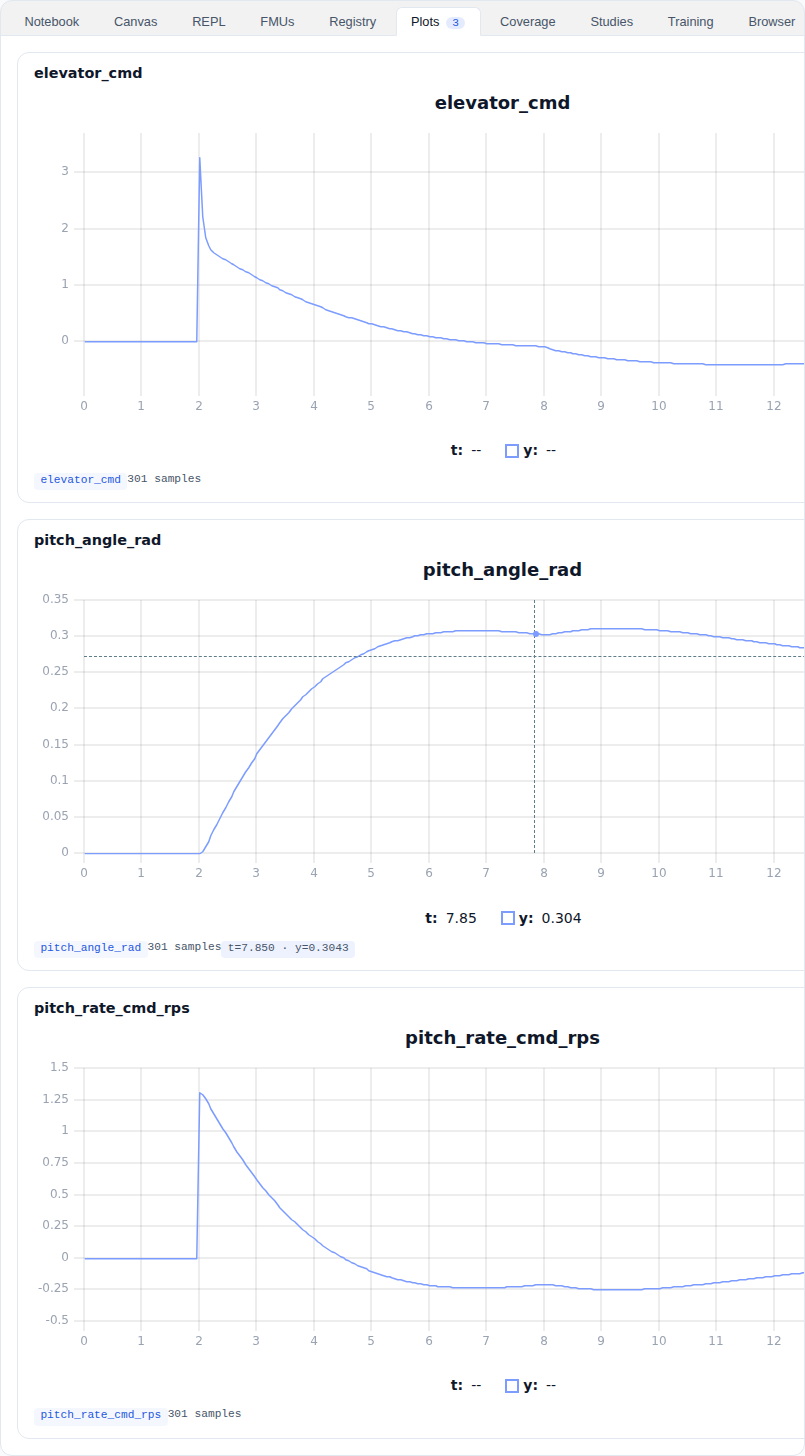
Quadcopter attitude stabilization
Cascaded outer attitude PID and inner pitch-rate loop holding a quadcopter level against a wind disturbance.
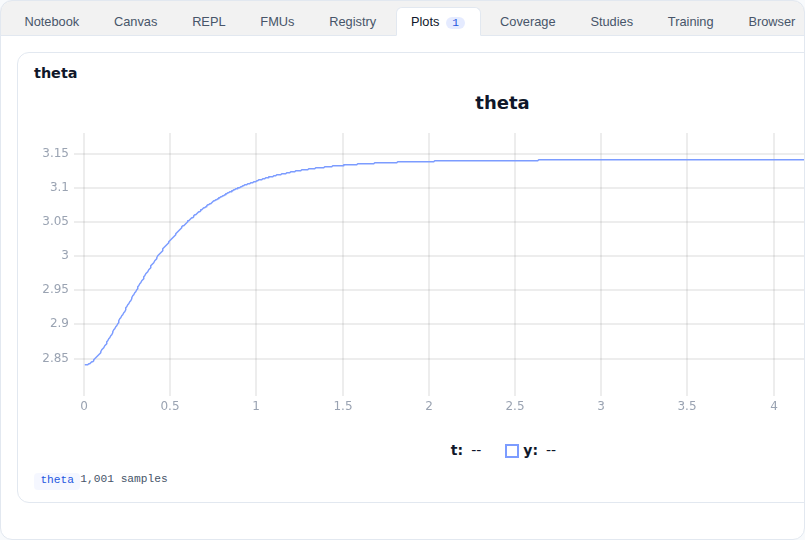
Inverted pendulum
The classic unstable-equilibrium problem — a closed-loop PID balancing an inverted pendulum upright.
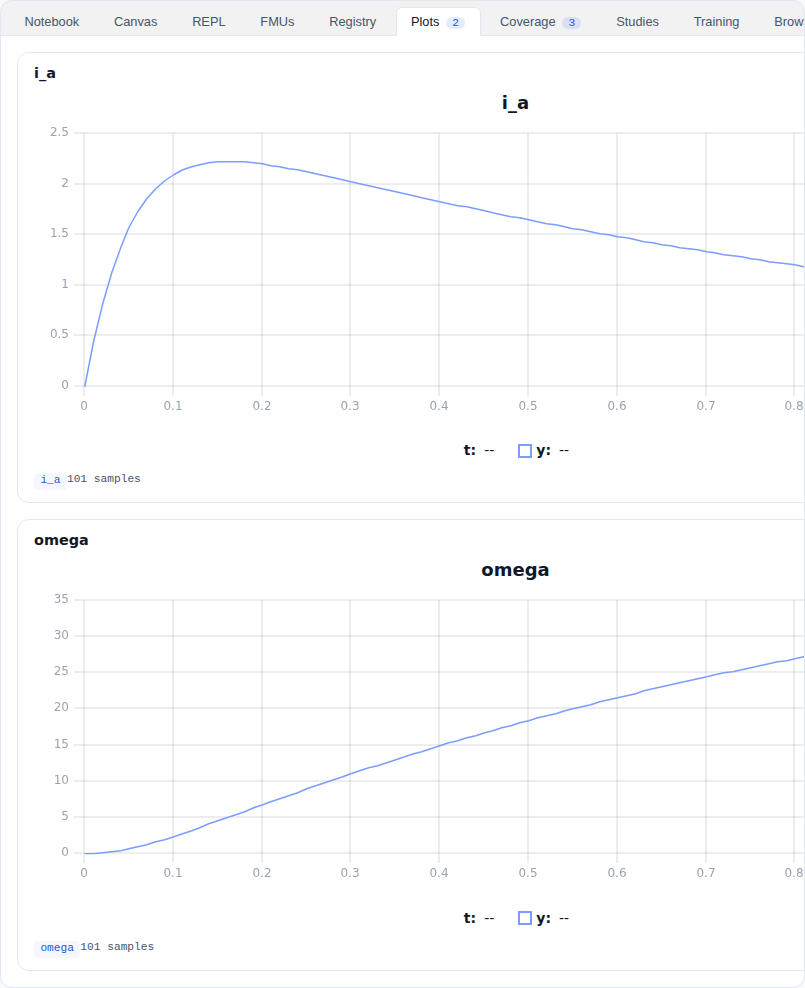
DC motor electromechanics
A multi-domain DC motor: the electrical pin domain coupled to 1-D rotational mechanics, solved as one acausal model.
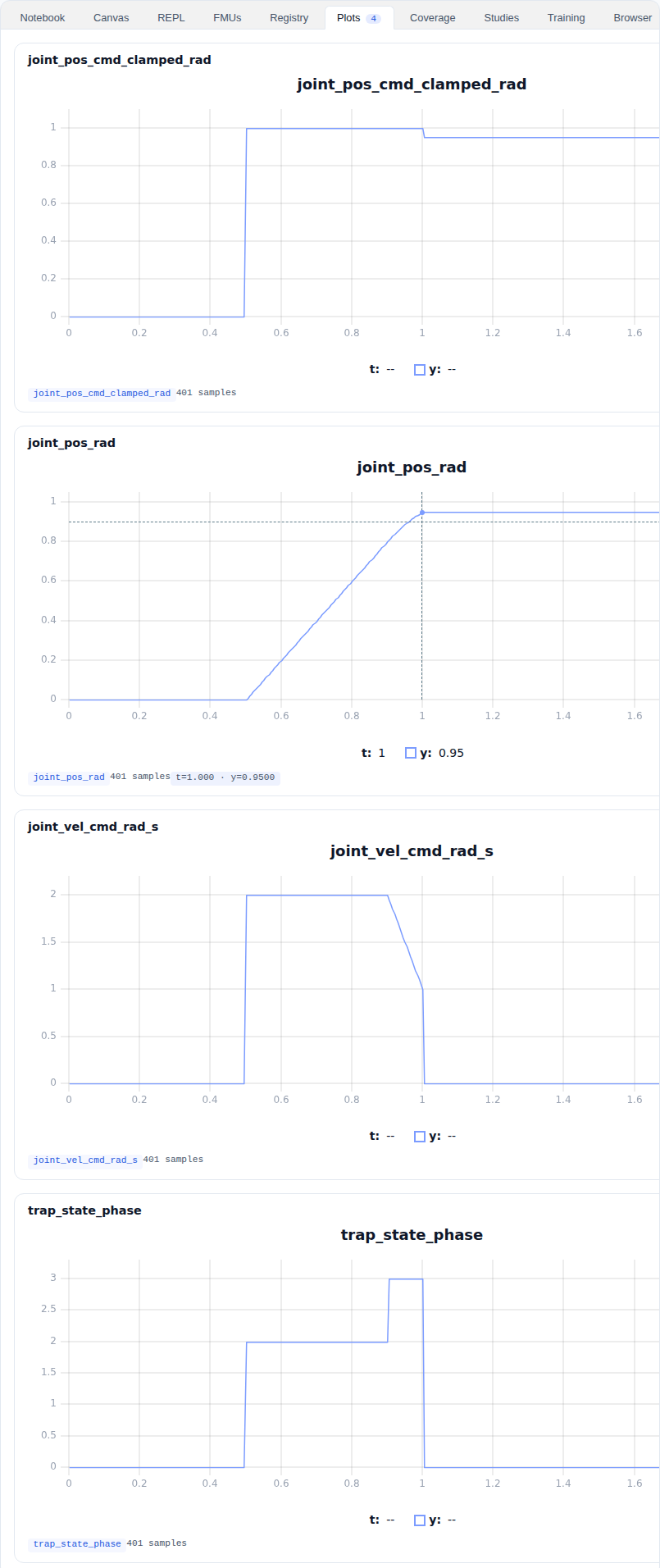
Robotic-arm joint motion
A trapezoidal velocity profile with joint-limit clamping — the motion-planning primitive of a robotic arm.
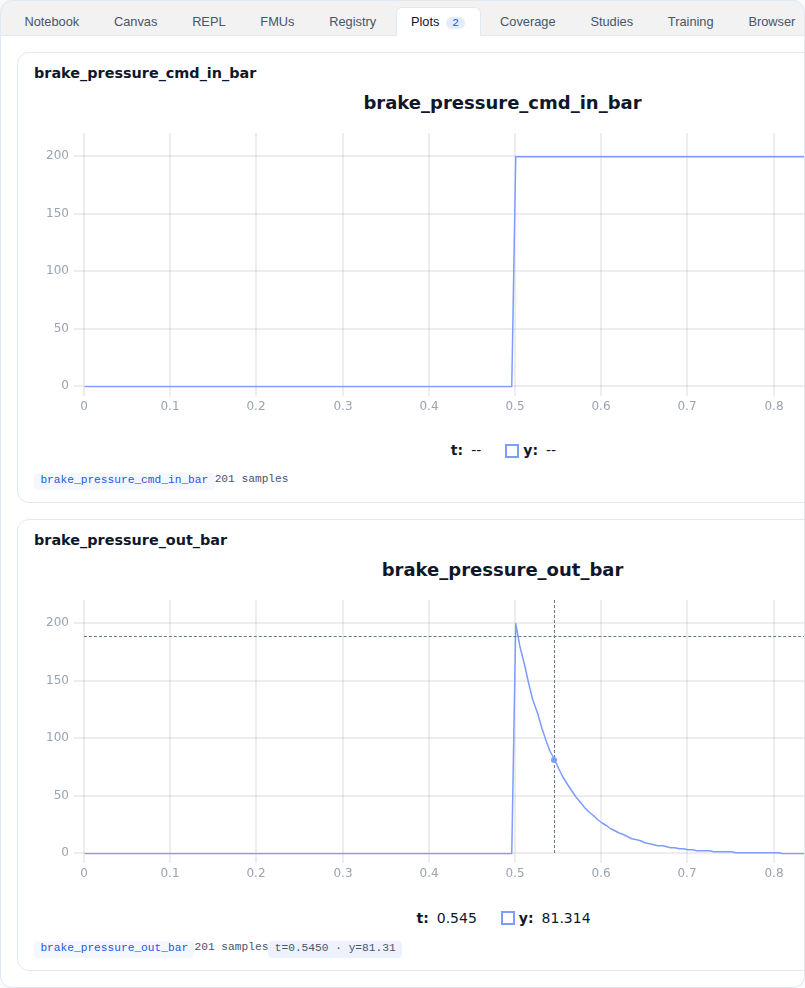
ABS slip control
An anti-lock controller modulating brake pressure to hold wheel slip in the traction band during hard braking.
More in this category
- Drone IMU sensor fusion
- Quadcopter waypoint mission
- Quadcopter pitch-axis attitude control
- PID DC-motor step response
- ESC yaw-stability controller
- Motor d-q current control (FOC)
- Engine torque-map sweep
- Battery SoC observer
See it on your own system.
We'll walk your team through DjiniousLab on the model, the replica, and the workflow you care about.
Book a demo