
Design the whole system on its digital replica.
DjiniousLab is one engineering notebook for model-based design. Model every aspect of your system, simulate and test it as a living digital replica, then generate the embedded software — and the physical parts — that ship.
Trusted by engineering teams



One engineering notebook. The whole product.
A digital replica is a high-fidelity, executable model of your system — physics, control logic, geometry, and all. In DjiniousLab it lives in one notebook, so the model you design, the replica you test, and the artefacts you ship never drift apart. Model, simulate, and generate are a single closed loop, not three disconnected tools.
…and every result flows back into the model. One closed loop.
Model & design. Simulate & test. Generate.
Every capability in DjiniousLab serves one of three jobs — and together they close the loop from idea to shipped artefact.
Model & design
Capture every aspect of the system as a model — block diagrams, multi-domain physics, control logic, and parametric geometry — on one fast canvas, in one notebook.
- Acausal block-diagram canvas: 600+ signal, electrical, mechanical, thermal, and hydraulic blocks
- Parametric CAD in a notebook cell with the3djin — revolve, loft, boolean, sweep
- Subsystem hierarchy, variants, and per-node parameter overrides in one place
- Reactive notebook + REPL alongside the model, so design and analysis never separate
Simulate & test
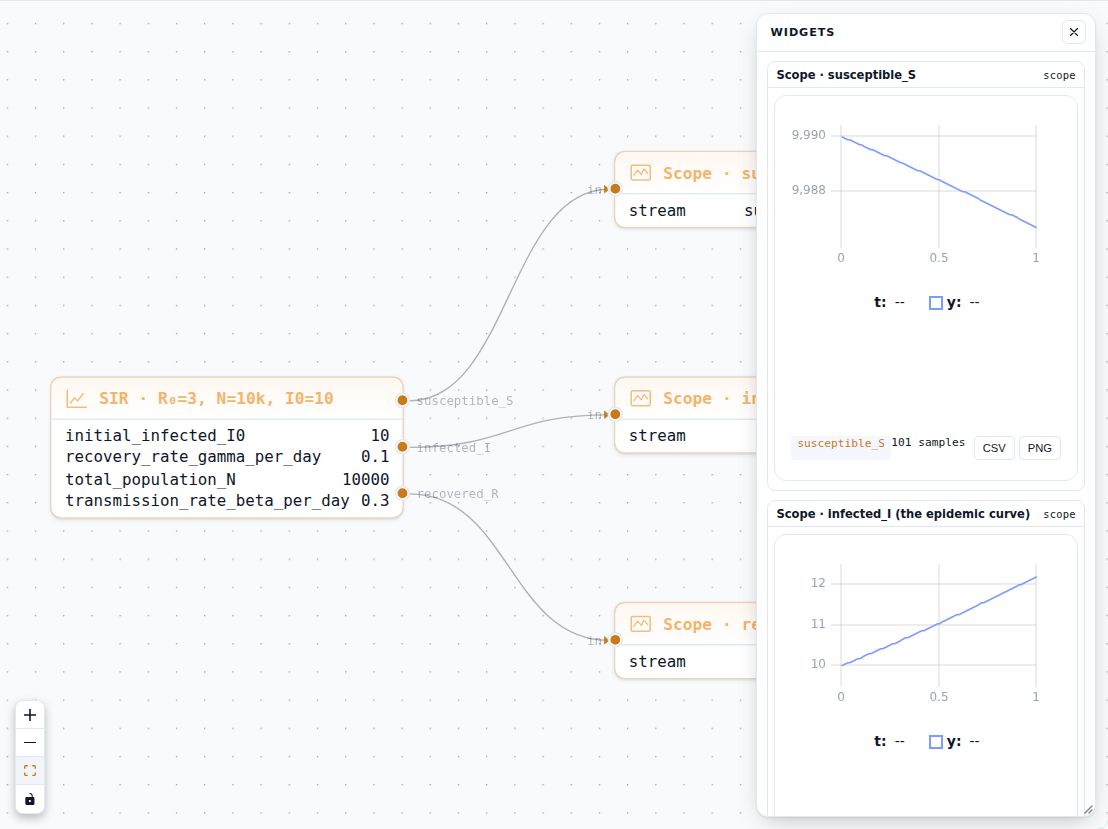
Run the digital replica. Close the loop, sweep parameters, and validate against requirements long before any hardware exists — with results streaming live as the solver integrates.
- Stiff and explicit solvers chosen per-subsystem; live scopes via Apache Arrow at >1M samples/s
- Parameter sweeps, CMA-ES / Bayesian optimisation, and PPO/SAC reinforcement learning
- Plotly, Three.js, maps, and SVG renderers stream into the notebook as the run proceeds
- Every run is branded with its GIR hash — reproducible, auditable, bit-exact on replay
Generate
Turn the validated replica into what ships. Today that means deterministic embedded firmware and FMI co-simulation units; the physical-parts half — generative design — is the direction we are building toward.
- Compile any model to #![no_std] Rust firmware: STM32, Cortex-M, ESP32/RISC-V, WASM, x86-64
- FMI 3.0 export — drop the compiled unit into any FMI-compatible tool
- the3djin emits STEP / STL geometry straight from a notebook cell (shipping today)
- Roadmap: generative design that shapes physical parts from simulated load cases
The same loop, across every domain.
A digital replica doesn't care whether it models an aircraft, a vehicle, or a factory cell. Each of these started as a model, was proven in simulation, and generated something that ships.

Autopilot, from model to flight.
An unmanned aircraft is a control problem, an airframe, and firmware — modelled together as one replica.
- ModelAirframe dynamics, sensor fusion, and the guidance loop on a single canvas.
- SimulateWind-gust Monte-Carlo runs validate the controller across the flight envelope.
- GenerateFlight-control firmware compiles to the on-board MCU, bit-exact to the sim.

Vehicle dynamics, validated before the prototype.
Drivetrain, battery, and chassis behave as one replica long before a physical car exists.
- ModelPowertrain, battery thermal model, and chassis dynamics wired on the canvas.
- SimulateStandard drive cycles sweep range, efficiency, and thermal limits in minutes.
- GenerateValidated control laws export as ECU firmware and an FMI co-simulation unit.

A robotic cell that's right the first time.
Kinematics, cycle time, and tooling are proven on the replica before the line is built.
- ModelArm kinematics, conveyor logic, and the cell layout modelled end to end.
- SimulateCycle-time and collision studies tune throughput before any steel is cut.
- GenerateController code ships today; generatively-designed tooling is on the roadmap.
An agent that can drive the whole loop.
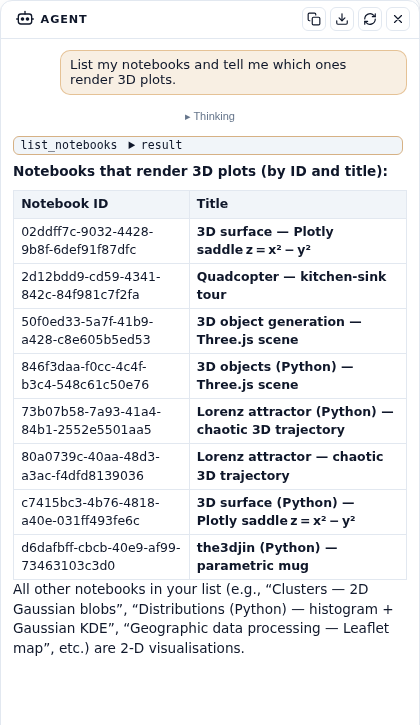
The built-in AI assistant works across the entire model→simulate→generate loop: it runs simulations, linearizes models, fits symbolic laws, trains neural surrogates, and kicks off code generation — all behind explicit approval gates so nothing executes without your sign-off. Pair it with the djl CLI or MCP server to let external agents orchestrate whole workflows with a single bearer token.
From drone autopilots to reactor kinetics.
Over 130 ready-to-run demos spanning nine engineering disciplines. Every demo is a digital replica you can open and run — seed data, expected outputs, and a companion notebook included.
Ready for production from day one.
DjiniousLab ships with the compliance and observability primitives that enterprise teams require — no bolt-on security or custom integrations needed.
OIDC SSO
Connect any OIDC-compliant identity provider — Okta, Azure AD, Google Workspace. Users authenticate once; roles sync automatically.
Multi-tenant quotas
Per-team CPU, memory, and storage caps enforced at the gateway level. No runaway jobs eating shared resources.
Audit logs
Every canvas edit, simulation run, and code-gen export is timestamped and attributed. Export to S3, GCS, or your SIEM.
OTLP tracing
OpenTelemetry spans flow from the browser through the gateway and worker. Drop into Grafana, Datadog, or Jaeger without custom instrumentation.
Session isolation
Each notebook session runs in a sandboxed worker process. A crashing simulation cannot affect another user's live session.
FMI 3.0 interop
Import existing .fmu co-simulation units from Modelica, OpenModelica, or Dymola and connect them directly on the canvas.
See it on your own system.
We'll walk your team through DjiniousLab on the model, the replica, and the workflow you care about.
Book a demo